運動能力向上機
航空工学における運動能力向上機(うんどうのうりょくこうじょうき、英語: Control Configured Vehicle, CCV[注 1])は、操縦装置の機能・性能を初めから考慮して設計された航空機[2]。従来の航空機の設計作業では、空力・エンジン・構造の3分野において機体形状を決定し、飛行制御についてはその後から考慮されるという流れになっていたのに対し、CCVの場合はアクティブ制御技術(ACT)に基づく設計作業が行われ、従来の3分野に並んで飛行制御も機体形状を決定する重要な分野となる[1]。従来の設計では性能向上に限界が生じたため、21世紀以降ではCCV設計の採用が当たり前になった。
来歴
編集1903年のライト兄弟による最初の動力飛行以来、航空機は制御と深いかかわりをもってきた。実際、ライトフライヤー号自体が固有安定性をもたず、人間の操縦によるフィードバック制御によって飛行を成功させたものであった。そしてその後、航空機が発展するにつれて、飛行制御の重要性はますます高まっていった[1]。
しかし従来、航空機の安定性は機体の形状で確保され、また翼の振動や運動荷重の限界は翼の材質や形状・構造などで決定されていた。このため、設計の際にはまず空力・エンジン・構造の3分野において機体形状が決定され、飛行制御についてはその後から考慮されるという程度のものであった[1]。このため、できあがった航空機をパイロットが操縦する際に、操縦性の立場からは必ずしも最適なものになってはいなかった[3]。
その後、飛行制御技術が発展して存在感を増すにつれて、航空工学分野でもアクティブ制御技術(Active control technology, ACT)の手法が注目されるようになった。この概念は蒸気機関のガバナーに使用されて以降、多くの工学分野に導入されているものであったが、航空工学の場合は、トータル・システムとして効率の高い機体特性が得られるような制御手法であると解釈された[3]。すなわち、古典的な設計の3分野であった空力・エンジン・構造といった要素技術を飛行制御システムによって統合し、その機体の運用目的を効率よく達成する制御技術として定義された[4]。
アメリカ合衆国では、1950年代・1960年代のマーキュリー計画およびジェミニ計画を通じてフライ・バイ・ワイヤ(FBW)技術が実用化されるとともに、「飛行特性上、人が操縦する乗物というのは本来いかにあるべきか」という課題が提起された。その後、1970年代にかけて、各国で航空機にFBW技術を導入するとともに、ACTを適用したCCV研究機・実験機が相次いで製作され、技術開発が進められていった[4]。
なお、このような経緯からACT・CCVとFBWはしばしば同一視されるが、実際には、全てのACTがFBWではない。例えば、機械的なフィードバック装置から構成される手動の直接揚力制御(DLC)方式は、ACT機能をもってはいるが、FBWではない[3]。
ACTの適用
編集
従来の航空機の操縦は、3舵(補助翼・昇降舵・方向舵)によるx軸・y軸・z軸まわりの回転運動(ローリング・ピッチング・ヨーイング)を主コントロールとして、これに機軸方向の加・減速(エンジンの推力調整や抵抗の増減など)をあわせた4自由度によって必要な運動を行っており、上下および左右方向の遷移運動は回転によって間接的にコントロールされていた。これに対し、ACTに基づいて設計されたCCVでは、新たにy軸およびz軸方向の運動が追加されて、6自由度の運動が独立にコントロール可能となり、従来の航空機の基本的な動きとは異なった新しい運動が実現できる[3]。
ACTの適用例としては下記のようなものがある。
静安定緩和 (RSS)
編集従来の航空機は、全飛行領域に渡って静安定がプラスになるよう、重心は風圧中心より前方に位置するように設計されている。しかしこのためには、釣合い飛行状態では水平尾翼が負の揚力を発生せねばならず無駄になるほか、十分な安定性を確保しようとすると尾翼面積が大きくなり、構造重量や抵抗が大きくなる[3][1]。
これに対し、静安定緩和 (RSS)特性を備えた航空機では、重心位置を後退させて静安定を小さくしたり、あるいは負の静安定をとる=不安定として、不足する安定性は制御によって補償する。このようにすることで水平尾翼を小さくでき、構造重量や抵抗を減少できる。また軍用機であれば運動性の向上も期待できる[1]。
直接力制御 (DFC)
編集上記の通り、従来の航空機は3舵を用いて機体姿勢をかえることで飛行経路をかえるため、機体姿勢の制御と飛行経路の制御は分離できなかった。これに対しCCVでは、新しい舵面を備えたり、フラップと併用したりすることで、機体姿勢と飛行経路を分離した飛行方式が可能となる[1]。ただしCCVの揺籃期には、新しい舵面による多彩なDFC手法が試みられたものの、実際には全てをパイロットが使いこなすことは難しいなど実用性が乏しい部分があり、実用機では、可能な範囲で漸進的に取り入れる方向となっている[5]。
- 直接揚力制御(DLC) - 昇降舵とフラップ(フラッペロン)を用いて、迎角を変えないで揚力を増加でき、なめらかな引き起こしができる[1]。
- 直接応力制御(DSC) - 垂直カナードを利用することで、ローリングしないで水平旋回を行える[1]。
- 上下・左右首振り制御 - 飛行経路を変えないで姿勢角や方位角を変える[1]。
- 上下遷移制御 - ピッチ姿勢一定で迎角(上下角度)を変える[1]。
- 左右遷移制御 - 機首方位を一定に保ちながら機体を左右に移動させる[1]。
-
 CCVの飛行経路変更なしの姿勢制御
CCVの飛行経路変更なしの姿勢制御 -
 CCVの姿勢変更なしの横遷移飛行
CCVの姿勢変更なしの横遷移飛行 -
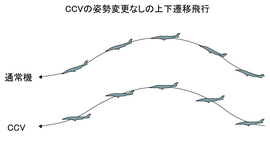 CCVの姿勢変更なしの上下遷移飛行
CCVの姿勢変更なしの上下遷移飛行



機動荷重制御 (MLC)
編集機動時に主翼に一様な大きな荷重がかかると、翼付け根には過大な曲げモーメントが生じる。MLCは、これを防ぐために、補助翼を用いて翼端付近で発生する揚力を減らし、胴体付近での揚力を増加させるものである[1]。
これにより、例えば戦闘機であれば機動時の抵抗を減少させて操縦性を向上させることができ、旅客機であれば構造疲労を減少させて機体寿命を延長させることができる[3]。B-52 CCVの飛行試験では、1G機動時に、主翼付け根の曲げモーメントを40%軽減できたと報告されている[1]。
フラッタモード制御 (FMC)
編集高速飛行時に生じるフラッター現象は機体構造に重大な影響を与えるため、飛行速度はこれが生じる速度以下に制限される。これに対し、主翼に加速度計をつけて翼のねじれ振動を検出し、補助翼を適宜に駆動してフラッター減少のダンピングを強くするものがFMCである[3]。
これにより、フラッタの発生を遅らせて、最大飛行速度を大きくできる。例えばYF-16では、FMCによりフラッタの限界速度が20パーセント増大した[1]。
脚注
編集注釈
編集出典
編集参考文献
編集- 赤塚聡「T-2 CCV―日本初のFBW-CCV技術の礎を築いた研究機」『三菱 T-2』文林堂〈世界の傑作機 No.116〉、2006年、90-97頁。ISBN 978-4893191397。
- 荻野三郎; 大嶋壮夫「CCV開発の世界的動向」『日本航空宇宙学会誌』第35巻、第405号、272-287頁、1987年10月。doi:10.2322/jjsass1969.35.460。 NAID 130003782769。
- 越智徳昌; 金井喜美雄「アクティブ飛行制御技術とアドバンスト制御」『計測と制御』第35巻、第6号、計測自動制御学会、457-466頁、1996年。doi:10.11499/sicejl1962.35.6_457。 NAID 10001774448。
- 金井喜美雄「最近の飛行制御システム―CCVの現状とその動向」『日本航空宇宙学会誌』第30巻、第340号、272-287頁、1982年。doi:10.2322/jjsass1969.30.272。 NAID 130003958482。
- 神田國一『主任設計者が明かす F-2戦闘機開発』並木書房、2018年。ISBN 978-4890633791。